專題製作 - 海報 專III
機械手臂定位與視覺應用
專題摘要:
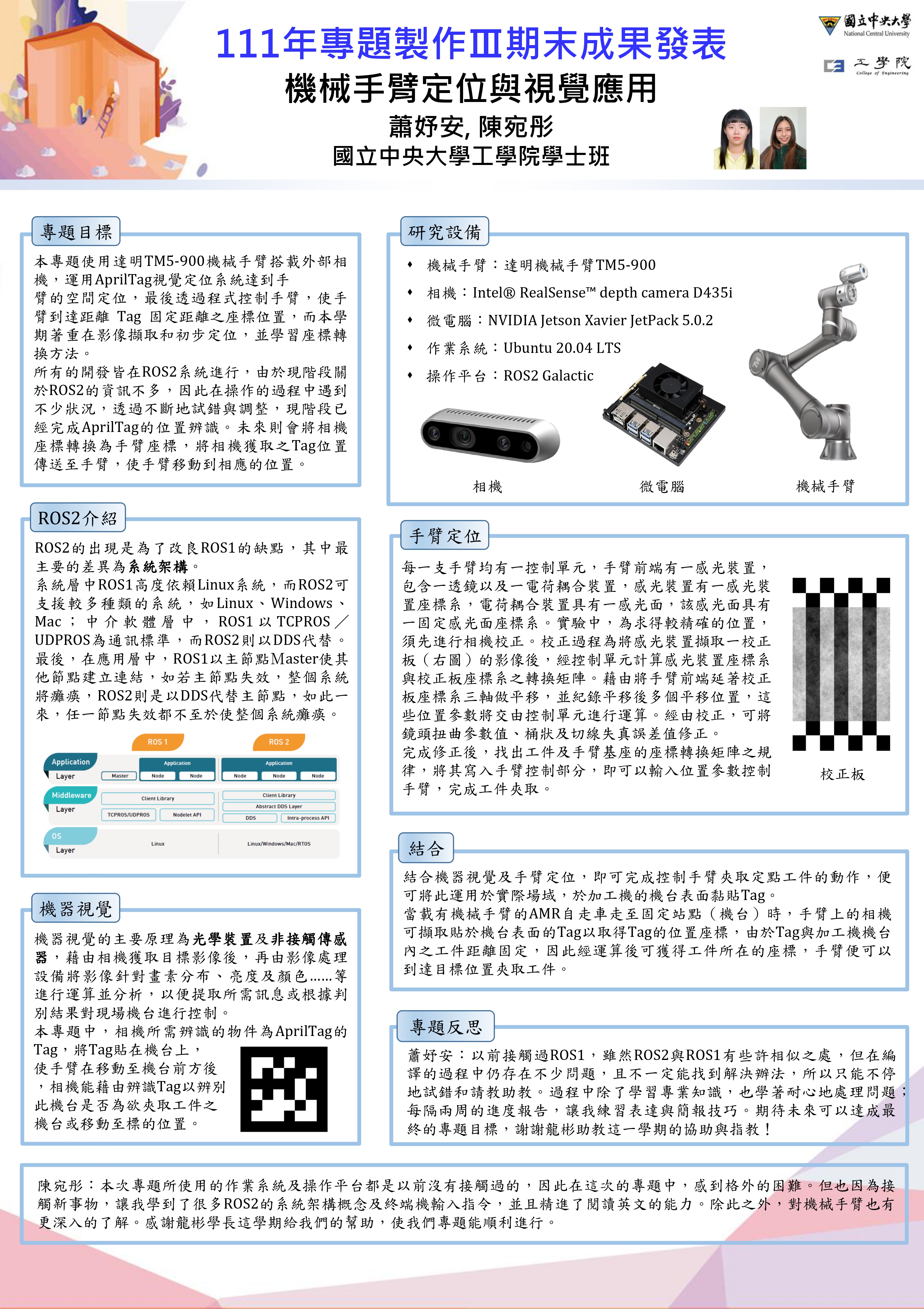
本專題使用達明TM5-900機械手臂搭載外部相機,運用AprilTag視覺定位系統達到手
臂的空間定位,最後透過程式控制手臂,使手臂到達距離Tag 固定距離之座標位置,而本學
期著重在影像擷取和初步定位,並學習座標轉換方法。
所有的開發皆在ROS2系統進行,由於現階段關於ROS2的資訊不多,因此在操作的過程中遇到不少狀況,透過不斷地試錯與調整,現階段已經完成AprilTag的位置辨識。未來則會將相機座標轉換為手臂座標,將相機獲取之Tag位置傳送至手臂,使手臂移動到相應的位置。
發表學期:111-1
領域:智慧機械
組別:第 10 組
指導老師:林志光教授
系級:三年級
學生姓名:蕭妤安, 陳宛彤