專題製作 - 海報 專II
機器人感測與周邊整合
專題摘要:
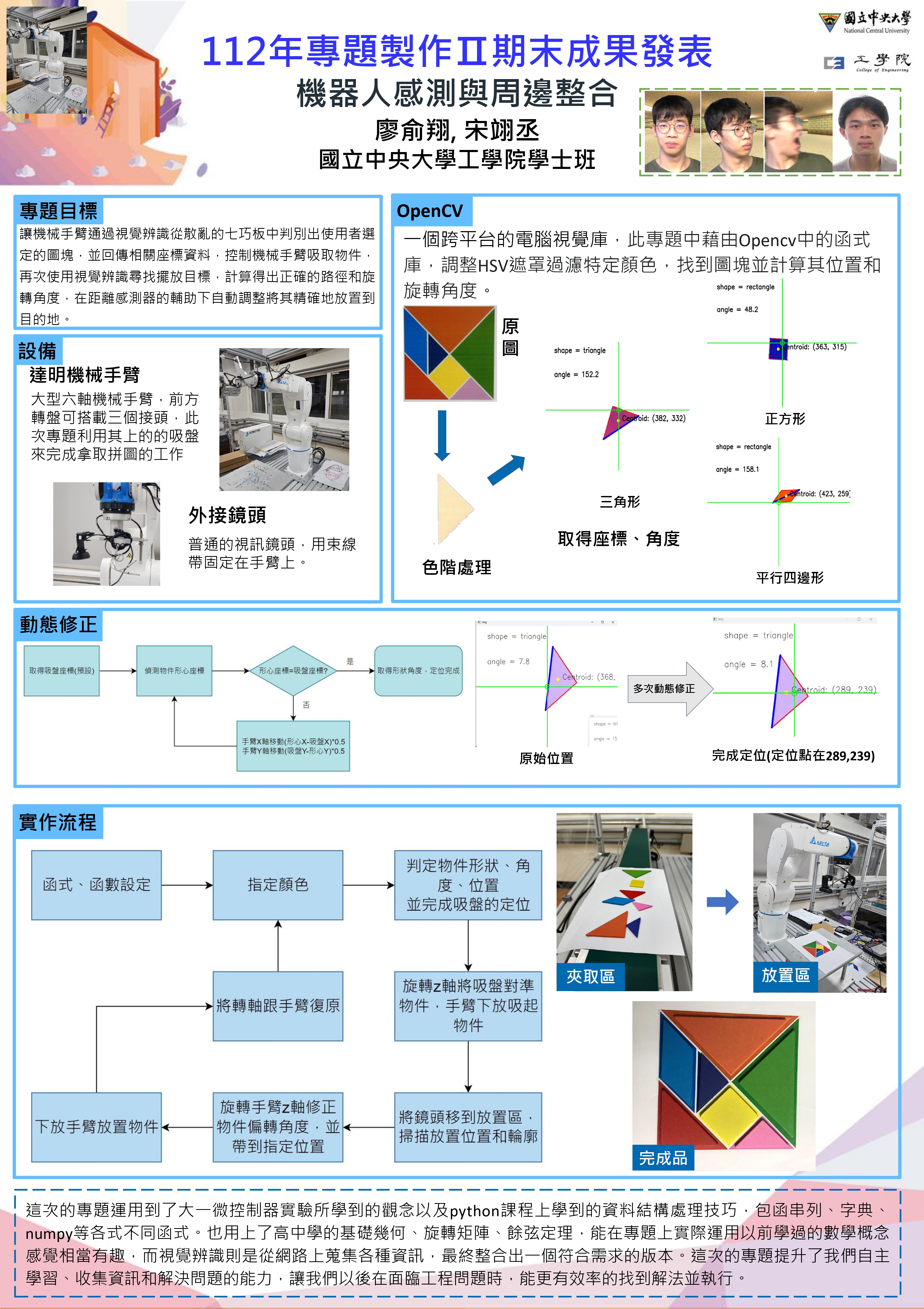
讓機械手臂通過視覺辨識從散亂的七巧板中判別出使用者選定的圖塊,並回傳相關座標資料,控制機械手臂吸取物件,再次使用視覺辨識尋找擺放目標,計算得出正確的路徑和旋轉角度,在距離感測器的輔助下自動調整將其精確地放置到目的地。
發表學期:112-2
領域:智慧機械
組別:第 6 組
指導老師:李朱育教授
系級:二年級
學生姓名:廖俞翔, 宋翊丞
專題摘要:
讓機械手臂通過視覺辨識從散亂的七巧板中判別出使用者選定的圖塊,並回傳相關座標資料,控制機械手臂吸取物件,再次使用視覺辨識尋找擺放目標,計算得出正確的路徑和旋轉角度,在距離感測器的輔助下自動調整將其精確地放置到目的地。
發表學期:112-2
領域:智慧機械
組別:第 6 組
指導老師:李朱育教授
系級:二年級
學生姓名:廖俞翔, 宋翊丞