專題製作 - 海報 專II
機器人感測與周邊整合
專題摘要:
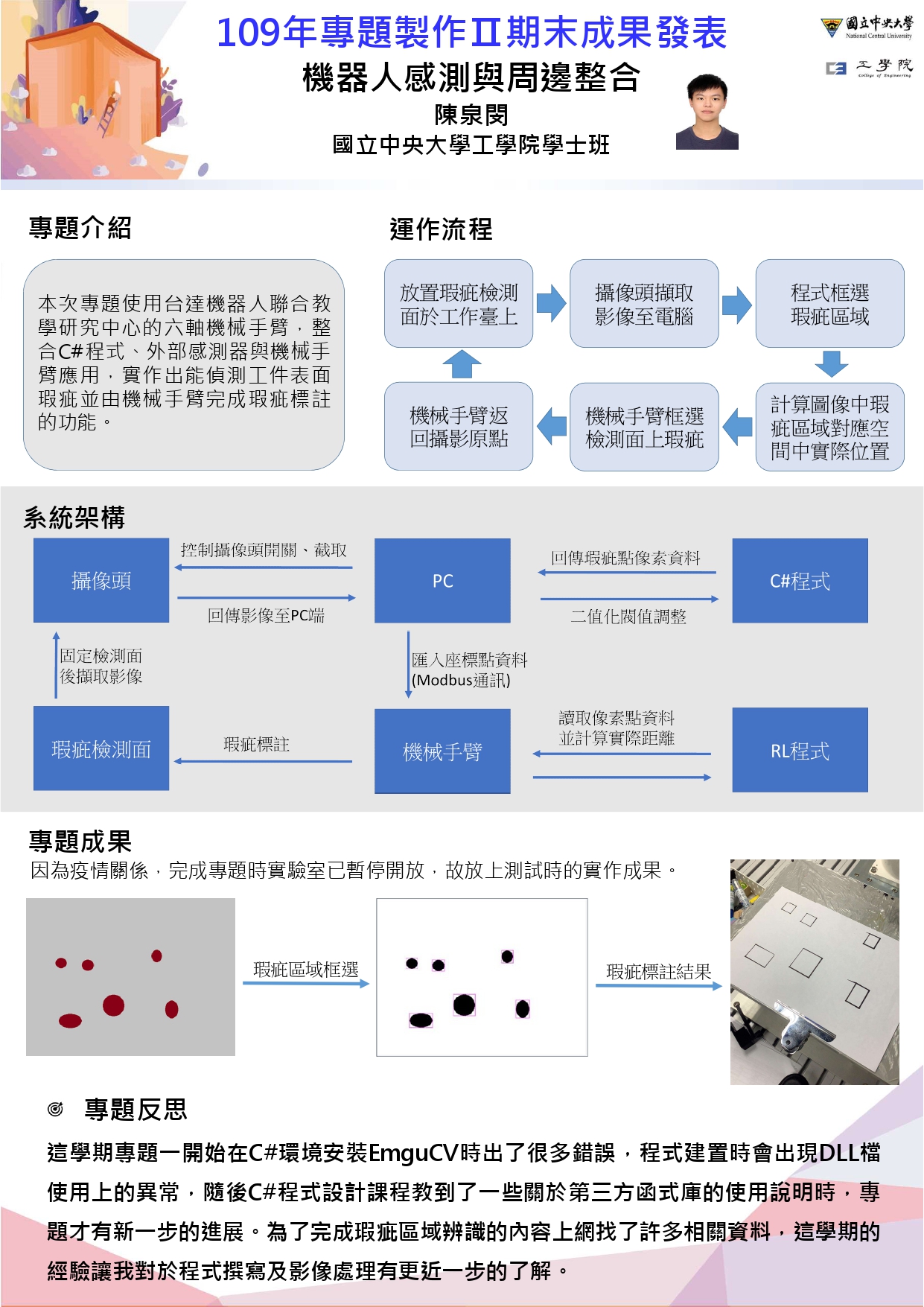
這學期專題操作台達的機械手臂,結合感測裝置、C#程式及手臂控制的整合。目標是辨識物體表面瑕疵區域,經由控制機械手臂完成表面瑕疵標註動作。影片中會介紹標註時所選用工具與夾具設計,影像處理程序以及機械手臂控制流程。
發表學期:109-2
領域:智慧機械
組別:第 7 組
指導老師:李朱育
系級:二年級
學生姓名:陳泉閔
專題摘要:
這學期專題操作台達的機械手臂,結合感測裝置、C#程式及手臂控制的整合。目標是辨識物體表面瑕疵區域,經由控制機械手臂完成表面瑕疵標註動作。影片中會介紹標註時所選用工具與夾具設計,影像處理程序以及機械手臂控制流程。
發表學期:109-2
領域:智慧機械
組別:第 7 組
指導老師:李朱育
系級:二年級
學生姓名:陳泉閔