專題製作 - 海報 專IV
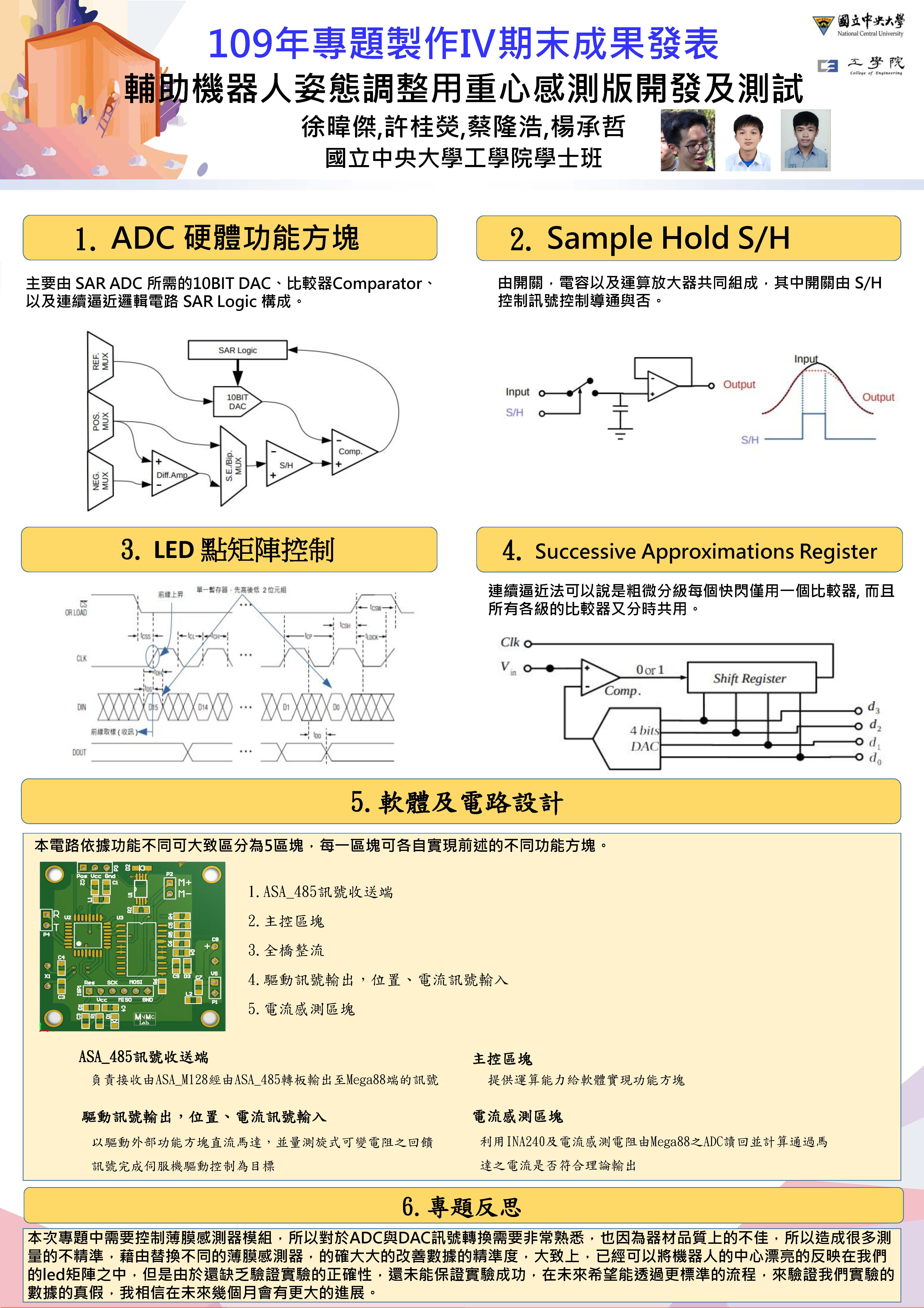
輔助機器人姿態調整用重心感測版開發及測試
專題摘要:
人型機器人,在調整姿態時,會有重心穩定或不穩定的不同姿態,通常都是調好姿態試擺於平面上看它會不會倒來判定,這種做法可能會摔到機器人。本專題會設計製作一個大型的LED矩陣顯示板,在板的四角安裝壓力感測器,由四角的壓力值推算出此重心感測板的上載物的重心位置,並即時以縱線與橫線十字交义顯示在LED矩陣顯示板上。當要調整機器人姿態時只要以機器人腳底板粘貼在重心感測板上,不論重心是否穩定都不讓它摔倒。並依據重心十字顯示位置是否經過腳底板區域來判定該姿態機器人重心是否穩定。據此可以輔助機器人教學者,在姿態輸入調整時可以迅速修正姿態取得連續穩定的運動姿勢。
發表學期:109-2
領域:能源材料
組別:第 4 組
指導老師:江世標
系級:三年級
學生姓名:蔡隆浩、徐暐傑、楊承哲