專題製作 - 海報 專IV
機械手臂影像定位
專題摘要:
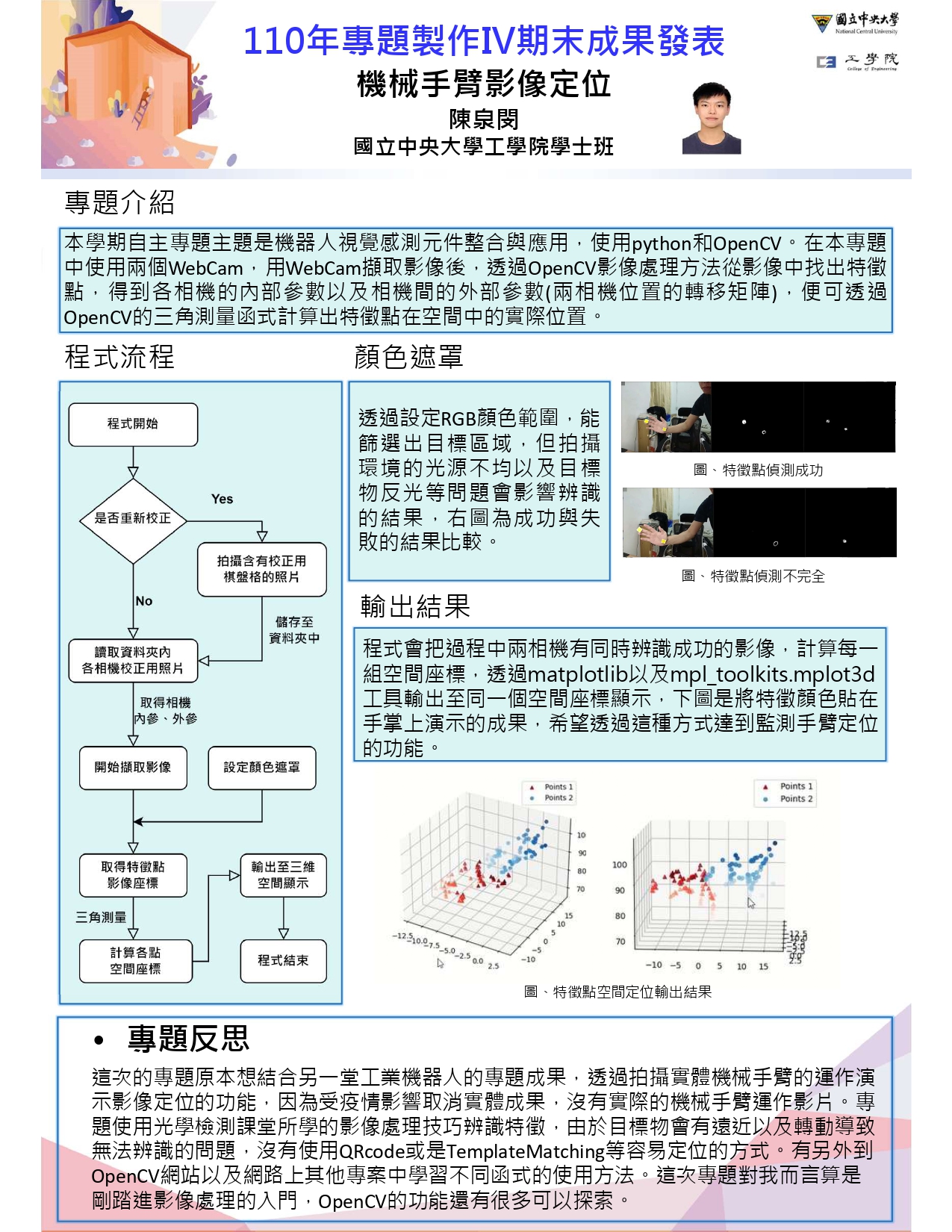
本次專題使用 Python 以及 OpenCV,用兩台相機從不同角度同時拍攝欲透過影像
進行定位的物體,用顏色遮罩以及過濾雜訊等影像處理方式篩選出特徵點,透過計算相機的
內參(焦距、畸變係數)以及外參(世界座標系對應至相機座標系的轉移矩陣)後,使用
OpenCV 的三角測量函式計算物體相對於相機的位置。專題中以多個顏色特徵點標定待測
物,目標是透過上述的影像處理方法紀錄物體上各點於空間中的移動。
發表學期:110-2
領域:智慧機械
組別:第 1 組
指導老師:李朱育
系級:三年級
學生姓名:陳泉閔