專題製作 - 海報 專IV
發展具有主動防撞與車道維持功能之自動駕駛車
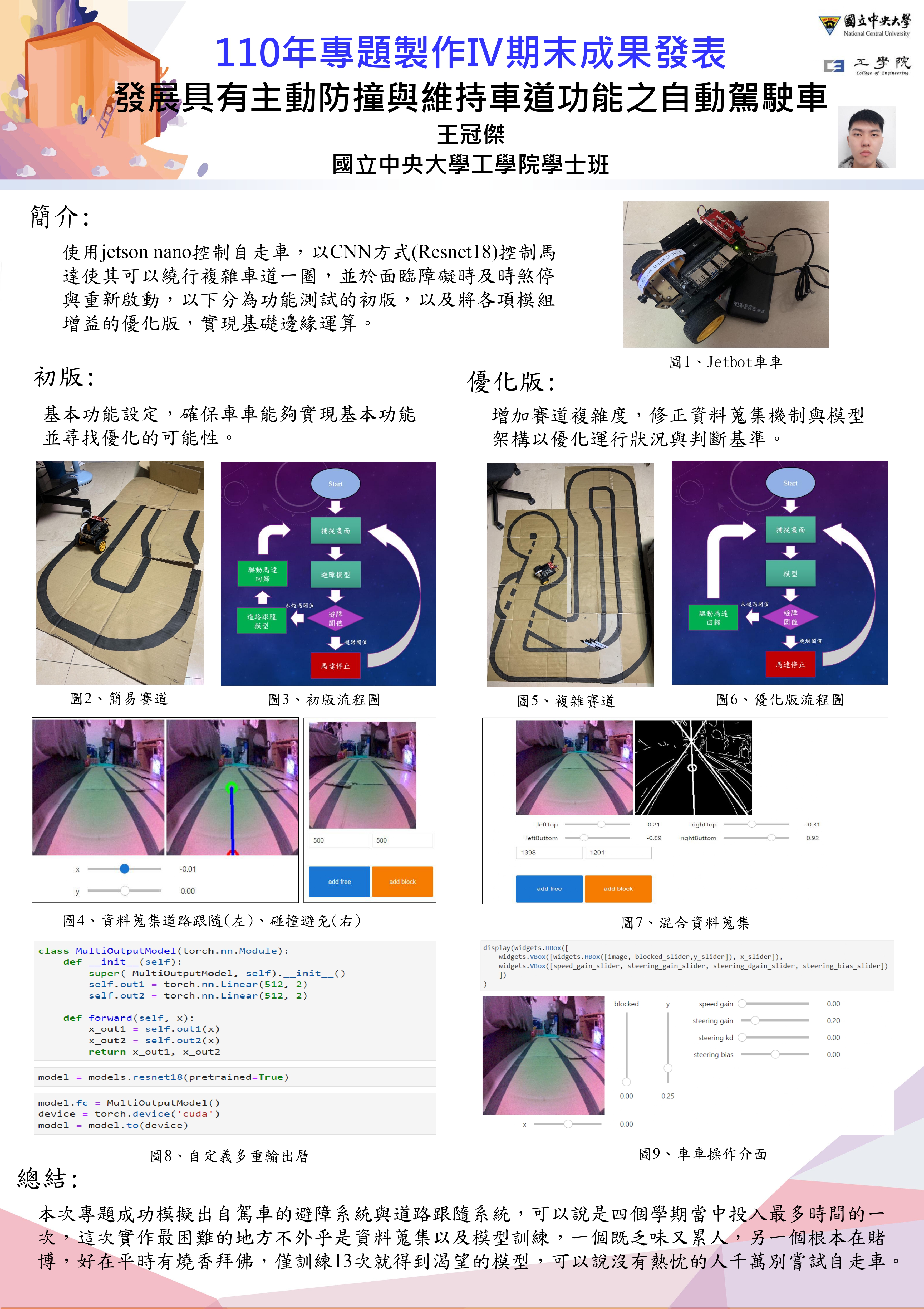
專題摘要:
本次專題藉由自走車更進一步研究 jetson nano 邊緣運算裝置的模型運算以及對周邊裝置驅
動。在初版設計中簡易繪製讓自走車運行的賽道,並在自走車中以序列的方式加入障礙物判
斷與道路跟隨的深度學習模型,使車車能在賽道上做出期望的反應。而在優化版中,道路設
計增添多樣性賽道,包含兩路交會、急轉彎、雙線合併,資料收集方面改寫資料的標籤方
式,之後建構出一個可以同時算出上述兩功能結果的模型。最後在實測中克服初版面臨的問
題成功讓車車繞行賽道一圈。
發表學期:110-2
領域:智慧機械
組別:第 3 組
指導老師:廖昭仰
系級:三年級
學生姓名:王冠傑