畢業專題 - 海報
機械手臂定位與視覺應用
專題摘要:
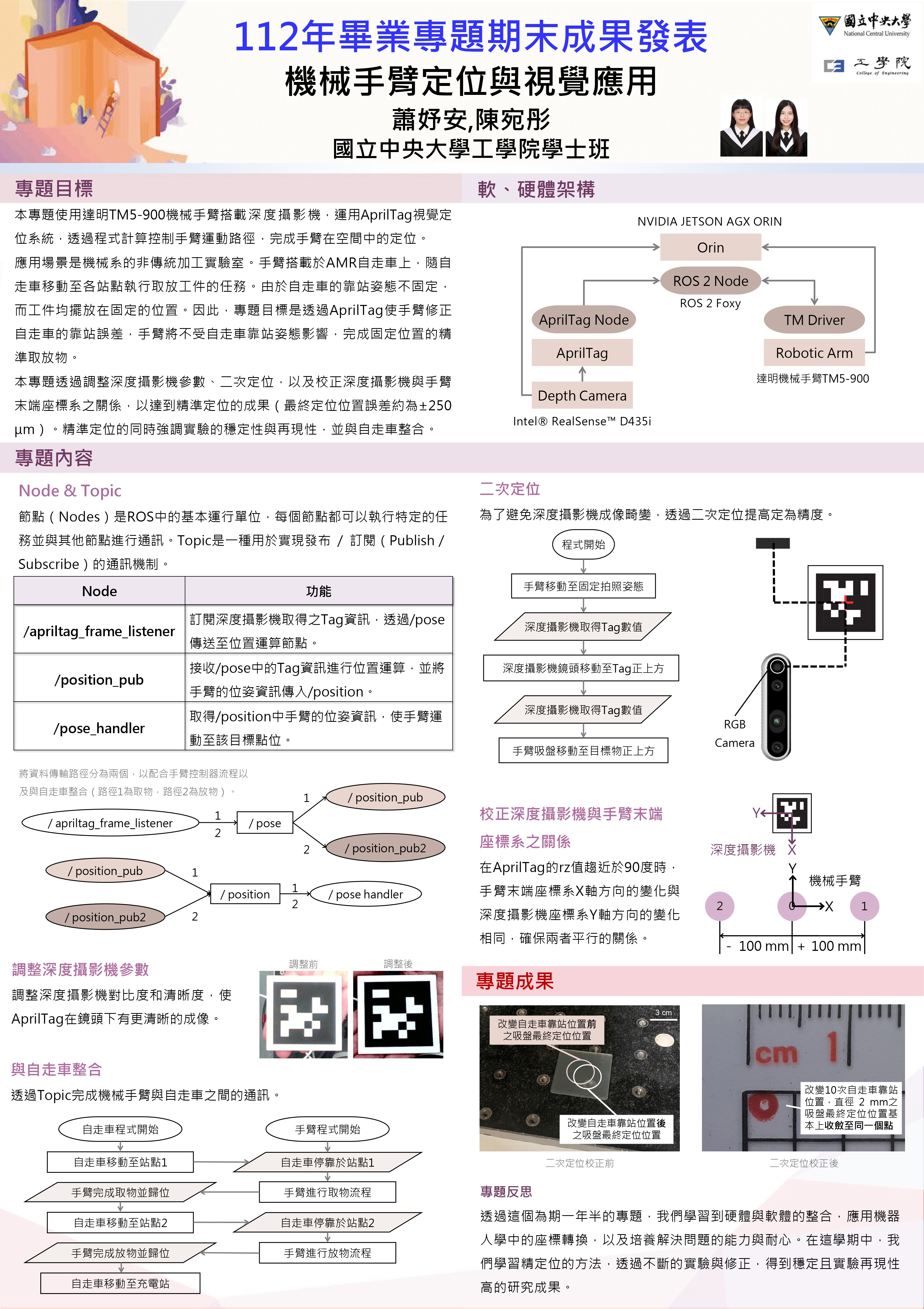
本專題使用達明TM5-900機械手臂搭載深度攝影機,運用AprilTag視覺定位系統,透過程式計算控制手臂運動路徑,完成手臂在空間中的定位。
應用場景是機械系的非傳統加工實驗室。手臂搭載於AMR自走車上,隨自走車移動至各站點執行取放工件的任務。由於自走車的靠站姿態不固定,而工件均擺放在固定的位置。因此,專題目標是透過AprilTag使手臂修正自走車的靠站誤差,手臂將不受自走車靠站姿態影響,完成固定位置的精準取放物。
本專題透過調整深度攝影機參數、二次定位,以及校正深度攝影機與手臂末端座標系之關係,以達到精準定位的成果(最終定位位置誤差約為±250μm)。精準定位的同時強調實驗的穩定性與再現性,並與自走車整合。
發表學期:112-1
領域:智慧機械
組別:第 2 組
指導老師:林志光教授
系級:四年級
學生姓名:蕭妤安 109305502 陳宛彤 109305506